

ZA-PT8120 5km电子对抗系统
云台顶端出线分别从两侧引出,左侧为AC220V/10A电源线,从云台托板16MM孔处预留650MM两芯2.5平方的多芯线,右侧为8芯网线从云台托板16MM孔处预留200MM八芯带屏蔽网线,上下均采用航空插头方式.
通过了ISO9001,14001,45001等多项国际标准体系认证,公司拥有业内领先的自主核心技术和可持续发展的研发能力,引进FPGA、DSP、ARM高速硬件和算法人才,拥有专业研发团队100余人。公司自主研发的高清激光云台摄像机、远红外高清云台摄像机、陀螺稳像跟踪吊舱、低空防御精密光电转台系列产品,广泛应用于智慧城市、铁路沿线、高速公路、环保监测、海事边防、森林防火、电力巡线、机场安保、地质监测等重大工程及公共安全与防灾减灾等重点项目。
关键字:
ZA-PT8120 5km电子对抗系统
- 产品描述
-
- 商品名称: ZA-PT8120 5km电子对抗系统
- 商品编号: 1001469612664905728
云台顶端出线分别从两侧引出,左侧为AC220V/10A电源线,从云台托板16MM孔处预留650MM两芯2.5平方的多芯线,右侧为8芯网线从云台托板16MM孔处预留200MM八芯带屏蔽网线,上下均采用航空插头方式.
产品技术参数
1、中性产品;
2、产品喷涂颜色待定,暂时按照中安标准颜色归档;
3、产品技术参数如附表;
序号
名称
技术指标
1
设备名称
5km电子对抗系统
2
云台旋转角度
水平: 360° 连续旋转,
垂直: -10° ~+70°3
云台转速
水平速度: 0.01° ~30° /S
俯仰速度: 0.01° ~10° /S
云台定位精度: ±0.1°4
电子对抗系统部分重量
≤85kg
5
电子对抗系统部分尺寸
≤900*900*600(L×W×H)
6
工作温度
-20°- 70℃
7
贮存温度
-40°- 75℃
8
防护等级
IP66
9
MTBF
4000h
4、云台顶端出线分别从两侧引出,左侧为AC220V/10A电源线,从云台托板16MM孔处预留650MM两芯2.5平方的多芯线,右侧为8芯网线从云台托板16MM孔处预留200MM八芯带屏蔽网线,上下均采用航空插头方式,具体对外接口参见下图:
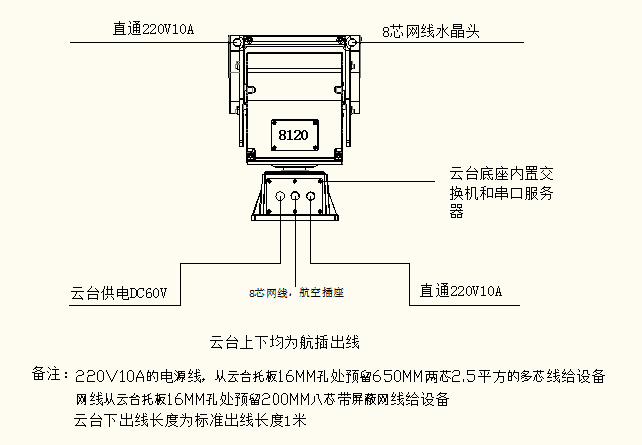
外部接口图
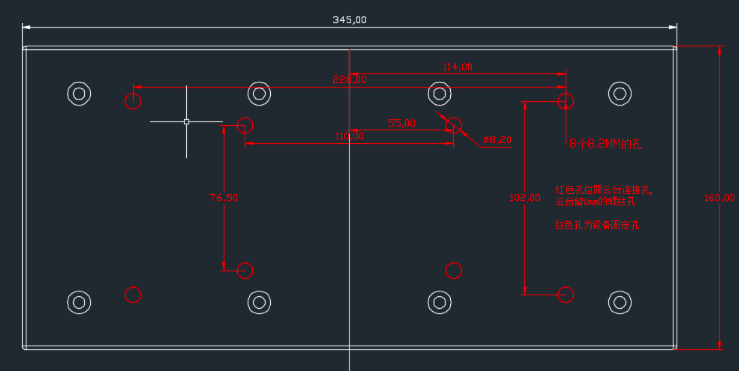
5、云台托板与设备结构接口图:
6、云台标配电源;
7、产品软件协议指令;
协议总纲:
一、每一类指令都按照下发的时间顺序执行。
当收到下一条指令需要执行时,先终止前一条指令执行。
二、云台标定数据:
pelco转动命令的速度值, 与云台角速度的标定数据,64组,步进 = 1(pelco速度1级);
三、云台控制分辨率: <= 0.05°;
四、实时性,回传数据的频率要求: <= 200ms
实时回传当前水平、俯仰位置
五、多字节数据为大端序;
具体指令如下:
a. 设置云台相对位置:0xFF,ADDR,0x00,0x87,水平高,水平低,俯仰高,俯仰低,checksum
设置云台相对位置的含义,一条指令下发,使云台在设置范围内进行相对转动多少度,其中180°-360°代表云台向左、向下移动相对的度数,0°-180°代表向右、向上移动相对的度数;
b. 设置云台绝对位置:0xFF,ADDR,0x00,0x89,水平高,水平低,俯仰高,俯仰低,checksum
设置云台绝对位置的含义,一条指令下发,使云台在(0.360),(0.360))的范围内到达绝对位置
b. 向左转:0xFF,ADDR,0x00,0x04,0x00,0x00,checksum
d. 向右转:0xFF,ADDR,0x00,0x02,0x00,0x00,checksum
e. 向上转:0xFF,ADDR,0x00,0x08,0x00,0x00,checksum
f. 向下转:0xFF,ADDR,0x00,0x10,0x00,0x00,checksum
g. 左上转:0xFF,ADDR,0x00,0x0C,0x00,0x00,checksum
h. 左下转:0xFF,ADDR,0x00,0x14,0x00,0x00,checksum
i. 右上转:0xFF,ADDR,0x00,0x0A,0x00,0x00,checksum
j. 右下转:0xFF,ADDR,0x00,0x12,0x00,0x00,checksum
k. 设置水平绝对位置:0xFF,ADDR,0x00,0x4B,水平高,水平低,checksum
l. 设置俯仰绝对位置:0xFF,ADDR,0x00,0x4D,俯仰高,俯仰低,checksum
m. 查询水平绝对位置:0xFF,ADDR,0x00,0x51,0x00,0x00,checksum
n. 查询俯仰绝对位置:0xFF,ADDR,0x00,0x53,0x00,0x00,checksum
o. 返回水平绝对位置:0xFF,ADDR,0x00,0x59,水平高,水平低,checksum
p. 返回俯仰绝对位置:0xFF,ADDR,0x00,0x5B,俯仰高,俯仰低,checksum
q.云台命令停止:0xFF,ADDR,0x00,0x00,0x00,0x00,checksum
r. 设置预置位: 0xFF,ADDR,0x00,0x03,0x00,0x00,checksum
s. 调用预置位: 0xFF,ADDR,0x00,0x07,0x00,0x00,checksum
t. 删除预置位: 0xFF,ADDR,0x00,0x05,0x00,0x00,checksum
上一页
上一页
相关产品





咨询